Overview
With the recent influx in demand for multi-robot systems throughout industry and academia, there is an increasing need for faster, robust, and generalizable path planning algorithms. Similarly, given the inherent connection between control algorithms and multi-robot path planners, there is in turn an increased demand for fast, efficient, and robust controllers. We propose a scalable joint path planning and control algorithm for multi-robot systems with constrained behaviours based on factor graph optimization. We demonstrate our algorithm on a series of hardware and simulated experiments. Our algorithm is consistently able to recover from disturbances and avoid obstacles while outperforming state-of-the-art methods in optimization time, path deviation, and inter-robot errors. The code is open source.
Video
Results
Citation
@ARTICLE{10380779,
author={Jaafar, Hussein Ali and Kao, Cheng-Hao and Saeedi, Sajad},
journal={IEEE Control Systems Letters},
title={MR.CAP: Multi-Robot Joint Control and Planning for Object Transport},
year={2024},
volume={},
number={},
pages={1-1},
doi={10.1109/LCSYS.2024.3349989}}
Appendix
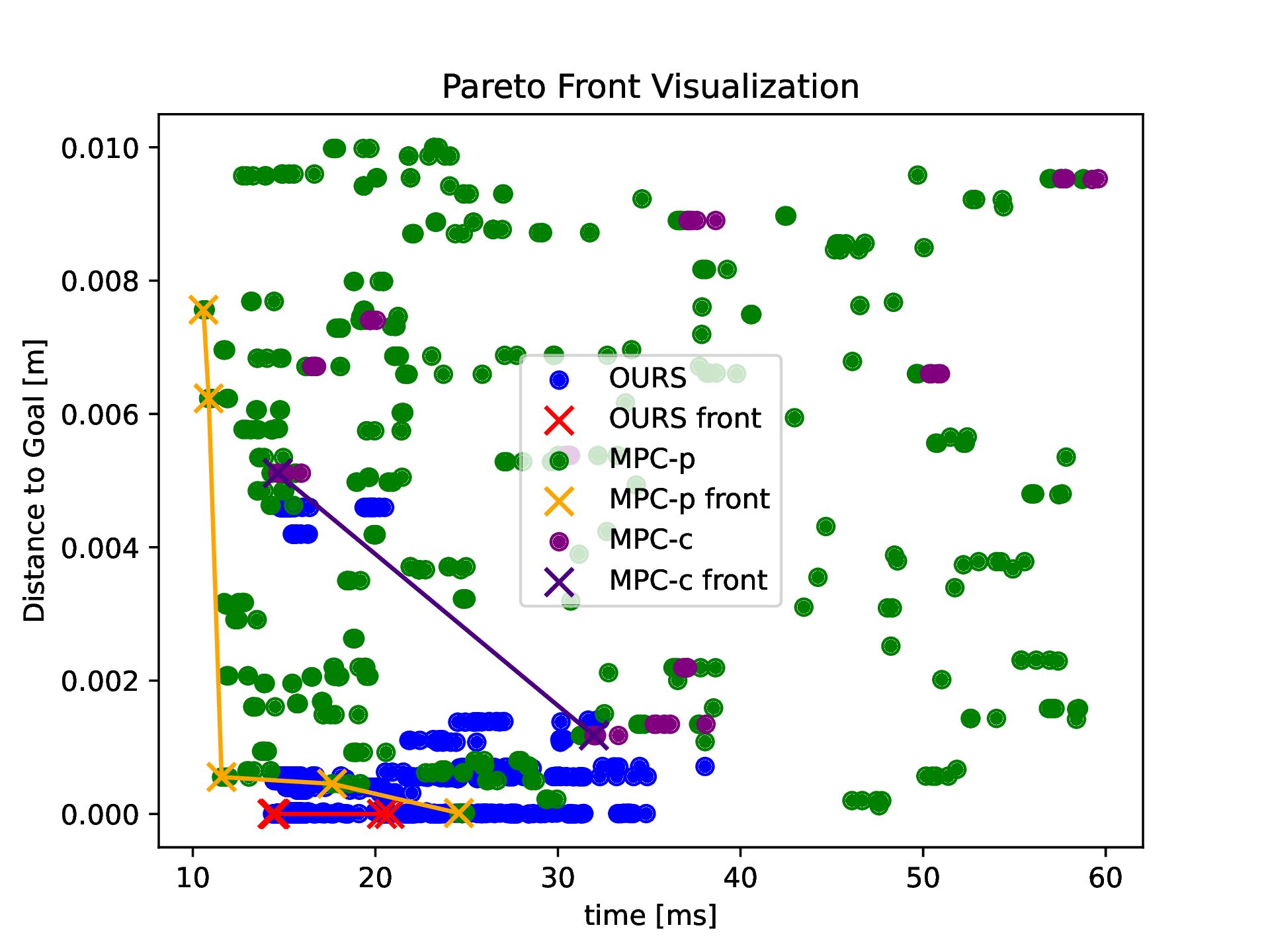
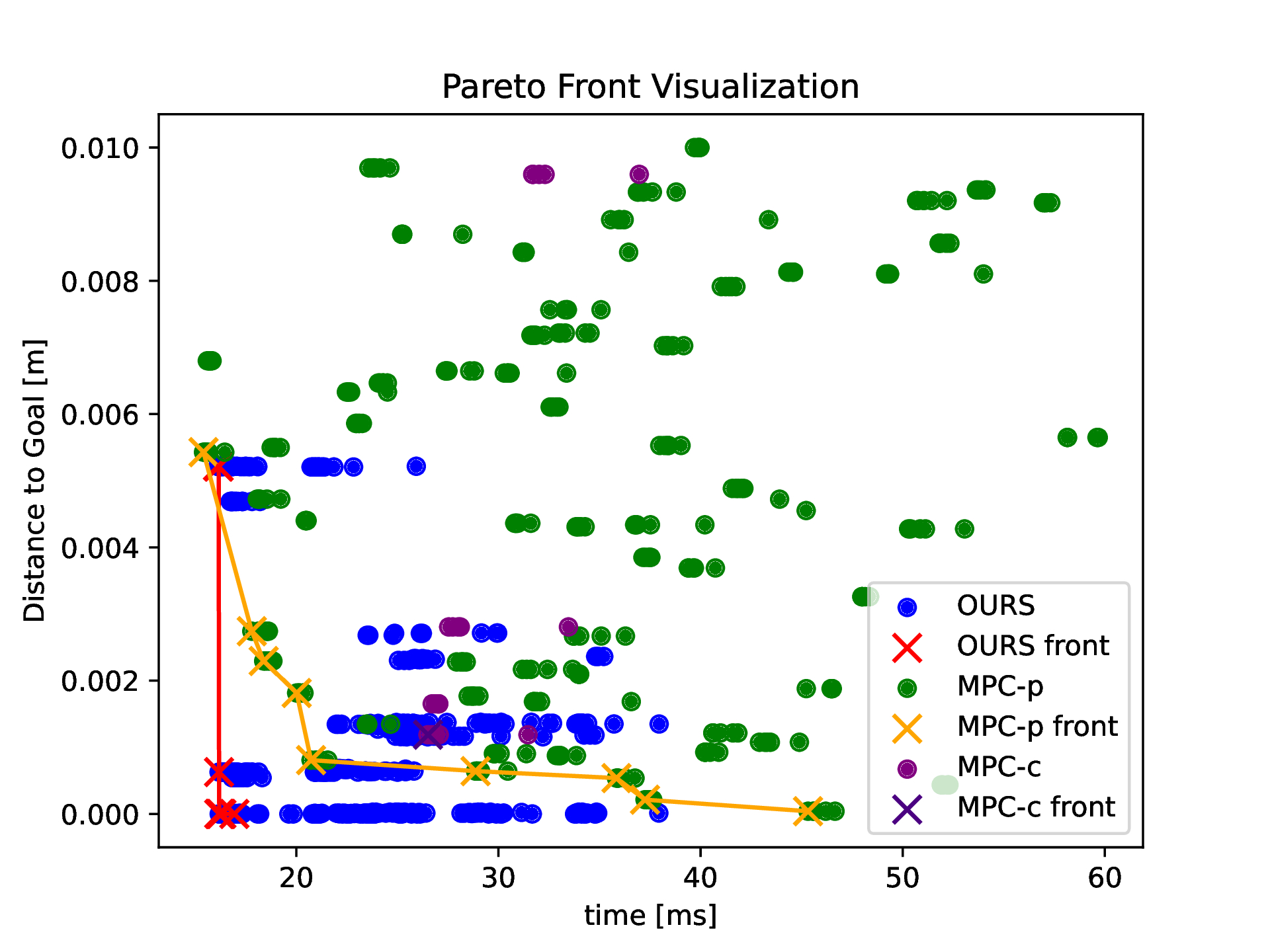
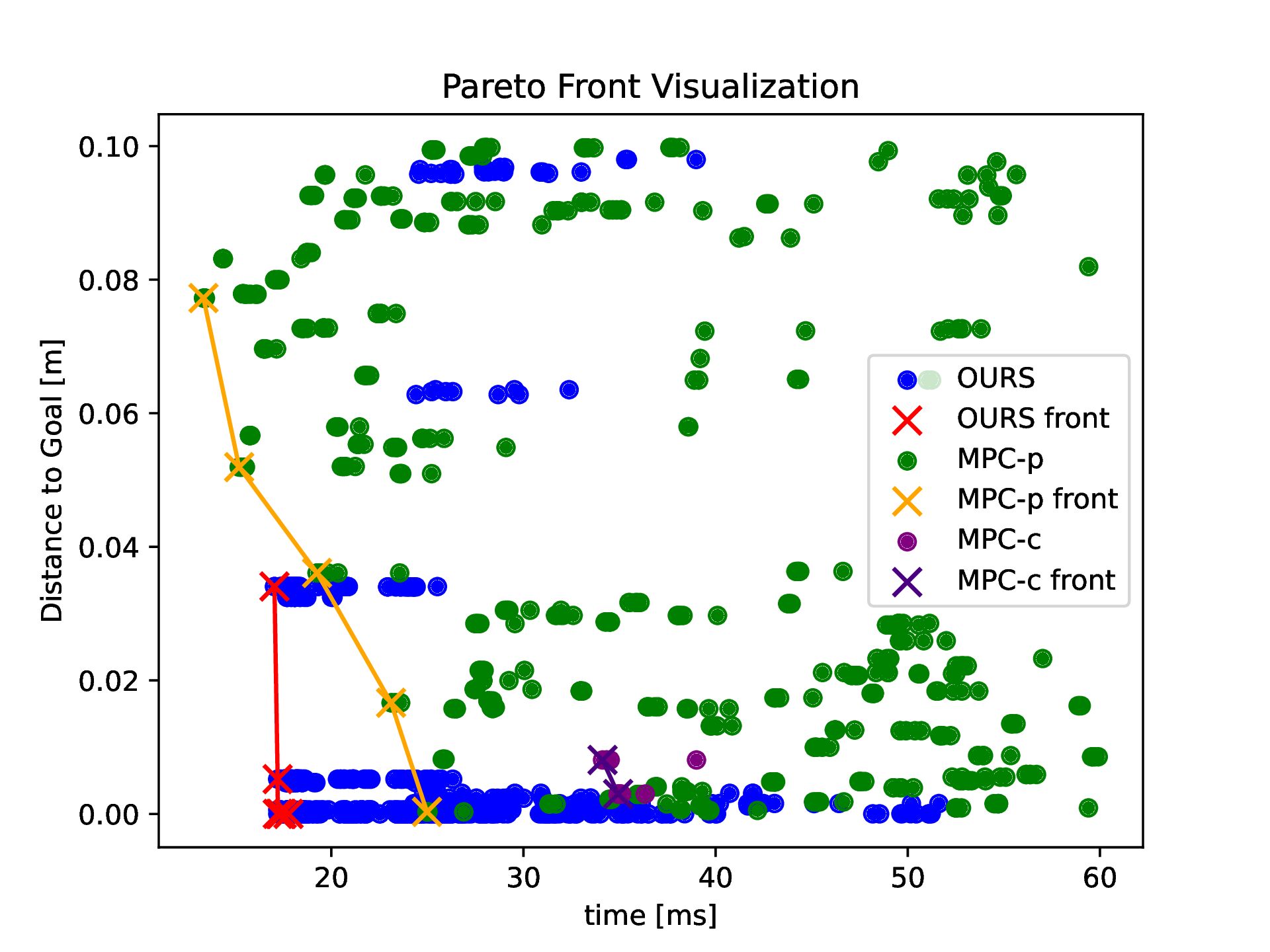
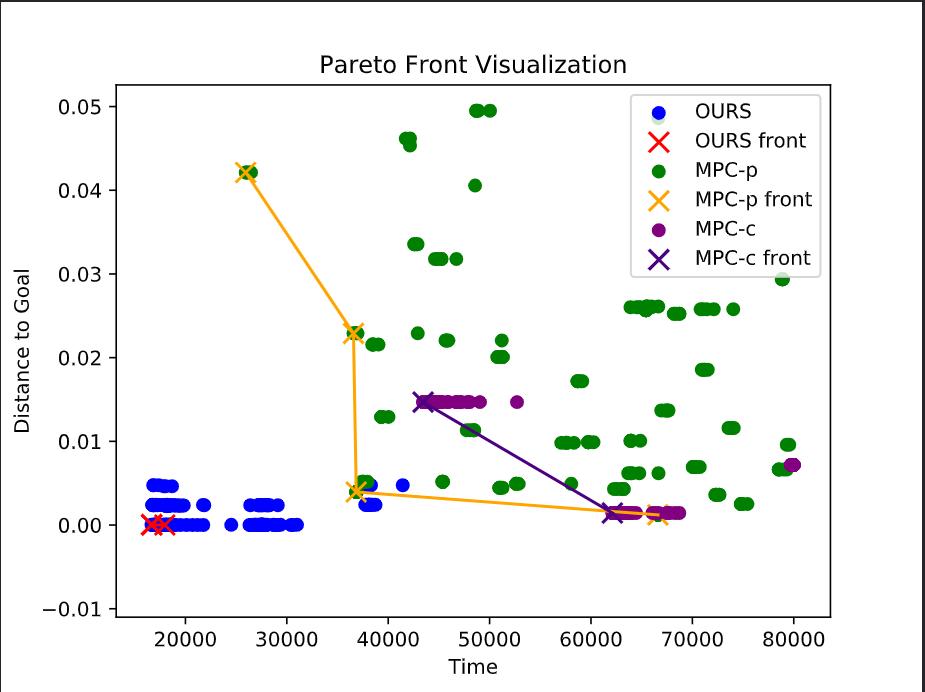
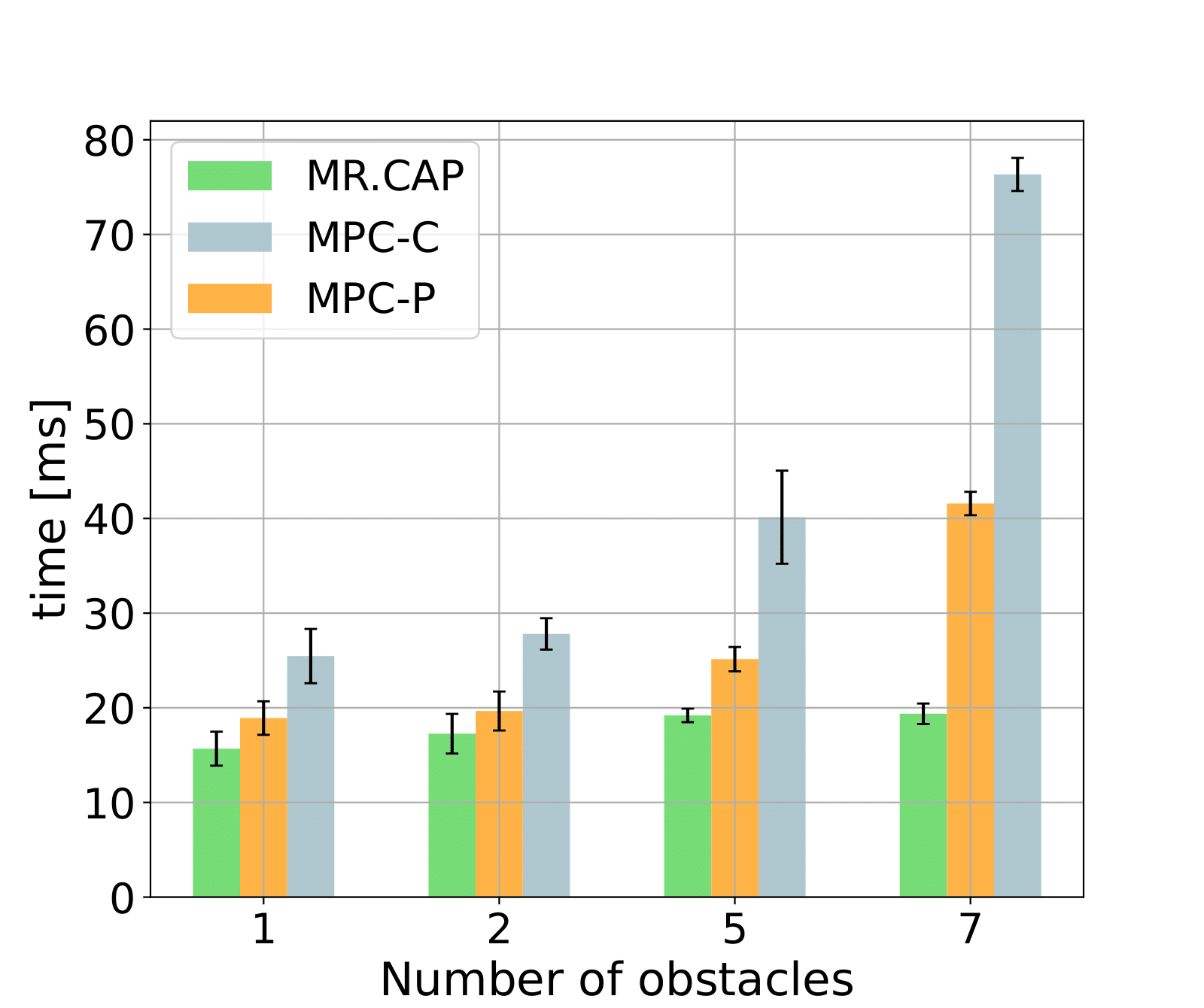
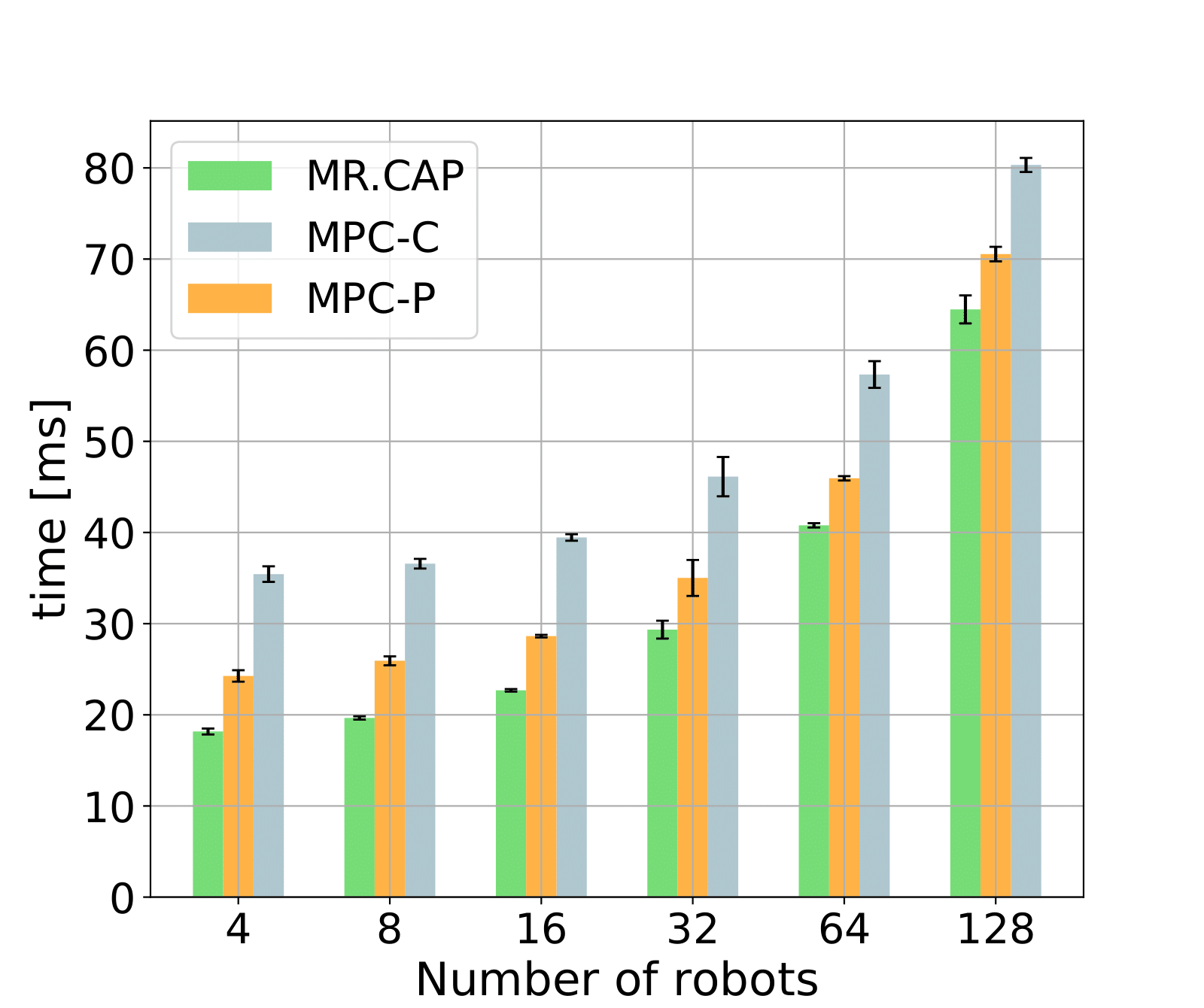
See the following figures for more details on the algorithm such as Pareto Frontiers and optimization time comparisons.