
Turtlebot3 Static Ip
How to Set Static IP for Turtlebot Introduction In this tutorial, we will learn how to set a static IP for Turtlebot3 robots using Netplan. We will be usin...

I am a Robotics Researcher with a passion for solving complex problems in autonomy. I currently work at Rosor Exploration on UAV autonomy, including sensor integration, VIO for GPS‑denied environments, and robust low‑altitude navigation. My MASc research focused on multi‑robot control and planning using factor graphs and Gaussian Belief Propagation. Previously, I was a member of the Robotics and Computer Vision Lab and the Vector Institute.
My research interests include:
Here are some of my open-source projects:
C++ algorithm for multi-robot control and planning. Produces more efficient and scalable solution than other comparable approaches.
Hybrid learned motion planning algorithm based on LSTMs. Produces a more efficient and robust solution than other learned approaches.
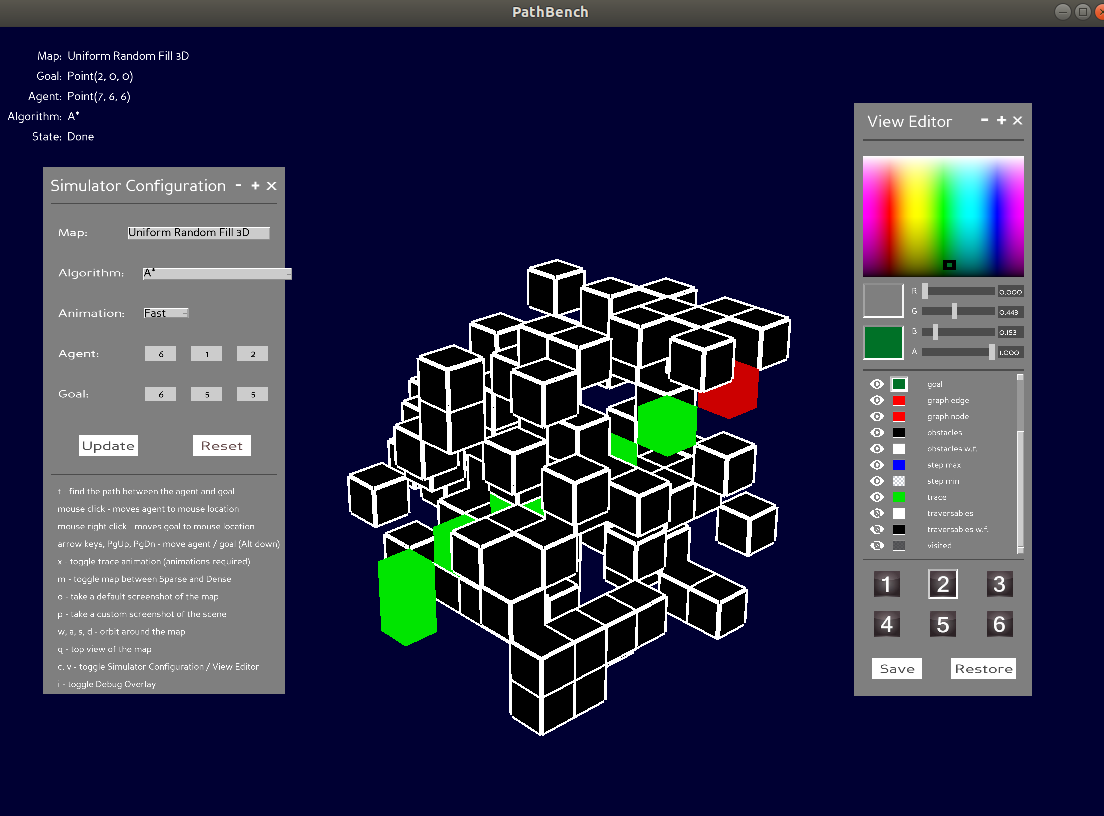
PathBench is an open source platform for developing, visualizing, training, testing, and benchmarking learned 2D and 3D path planning algorithms.
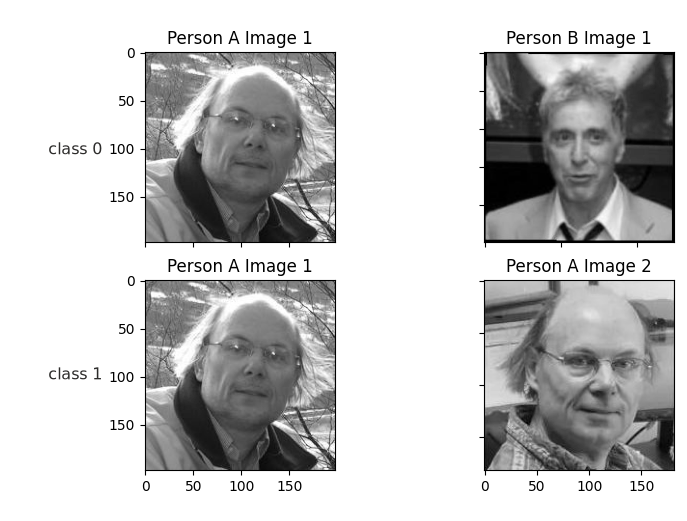
Applied Framework for One-shot Face Recognition using Siamese Neural Networks in Python. Tensorflow, Keras, and scikit-learn.
For more projects, visit my projects page.
How to Set Static IP for Turtlebot Introduction In this tutorial, we will learn how to set a static IP for Turtlebot3 robots using Netplan. We will be usin...