My work covers a wide span of projects including robotics, machine learning and computer vision. This page highlights some notable projects

MR.CAP: Multi-robot Joint Control and Planning for Object Transport
C++ algorithm for multi-robot control and planning. Produces more efficient and scalable solution than other comparable approaches.
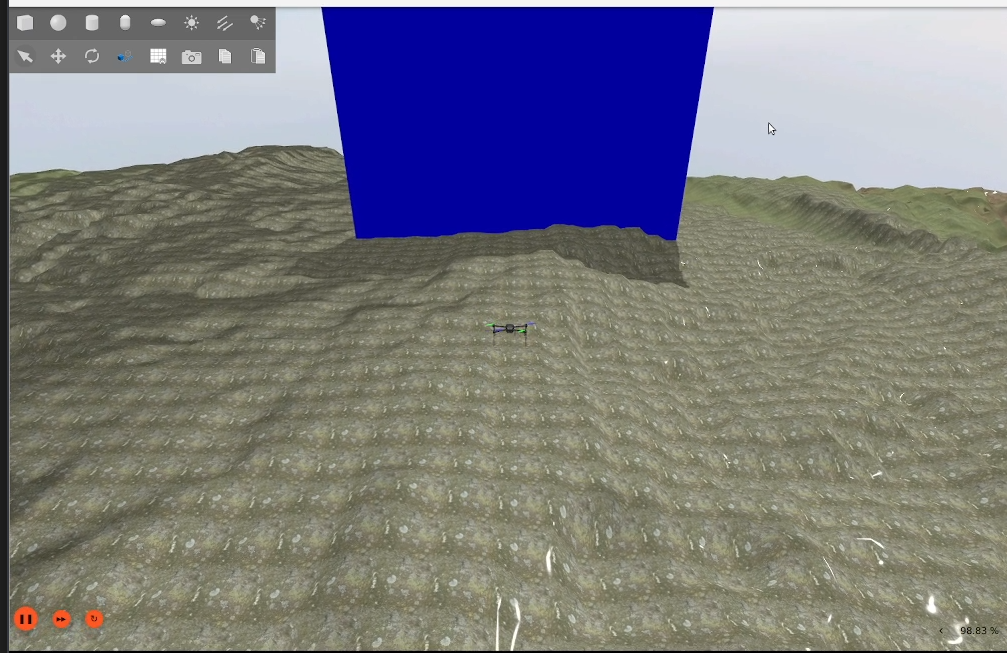
Terrain Following and Obstacle Avoidance
Developed a terrain-following and obstacle avoidance algorithm for a UAV using a series of rangefinder sensors.
Waypoint Planning Networks
Hybrid learned motion planning algorithm based on LSTMs. Produces a more efficient and robust solution than other learned approaches.
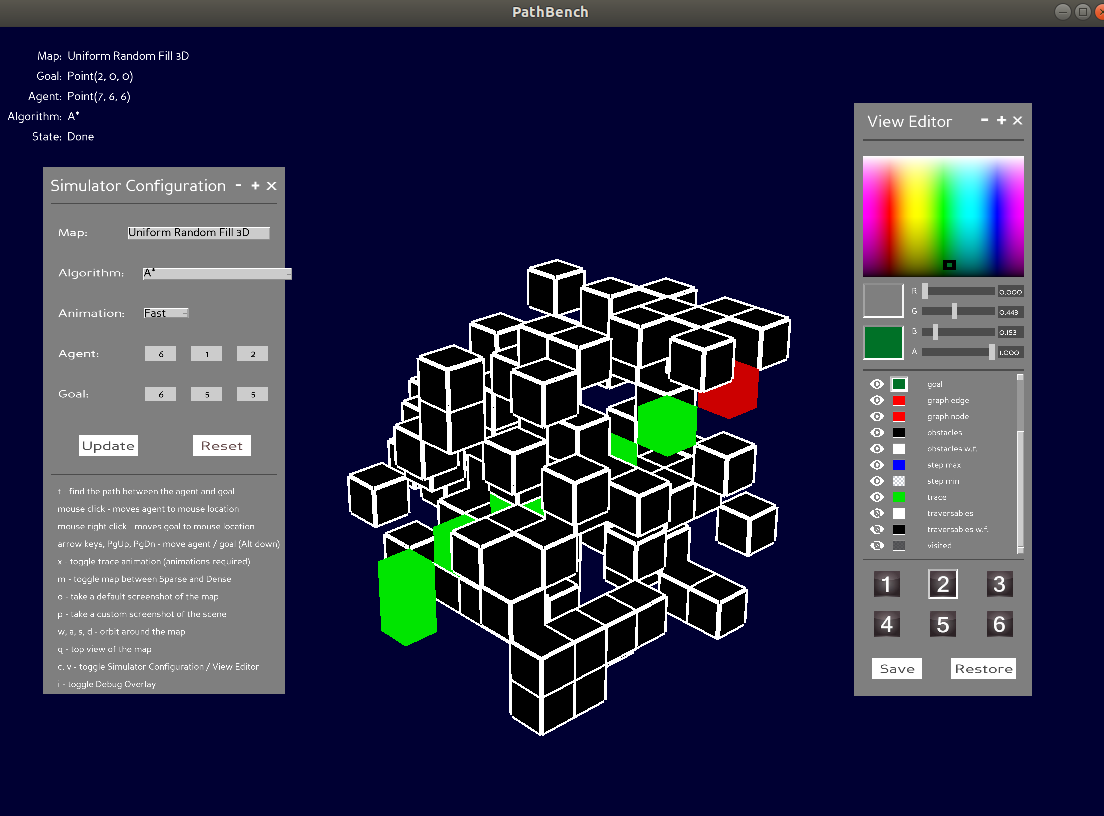
PathBench
PathBench is an open source platform for developing, visualizing, training, testing, and benchmarking learned 2D and 3D path planning algorithms.
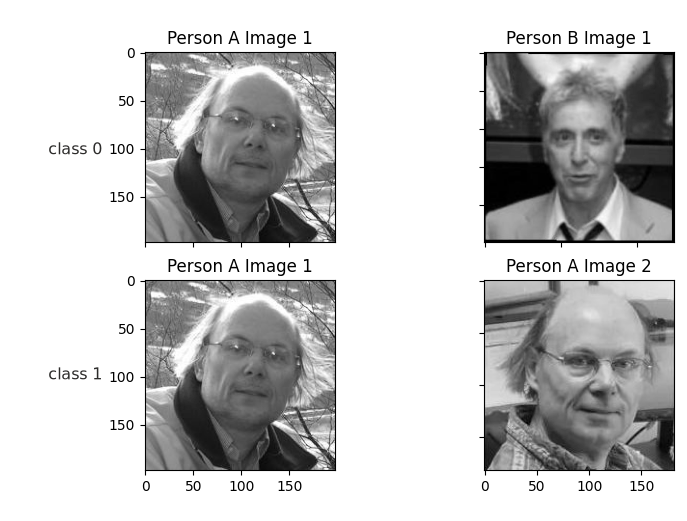
One-shot face recognition
Applied Framework for One-shot Face Recognition using Siamese Neural Networks in Python. Tensorflow, Keras, and scikit-learn.